
The whole project structure is composed of seven RTD Workpackages (WP) which are grouped in three layers.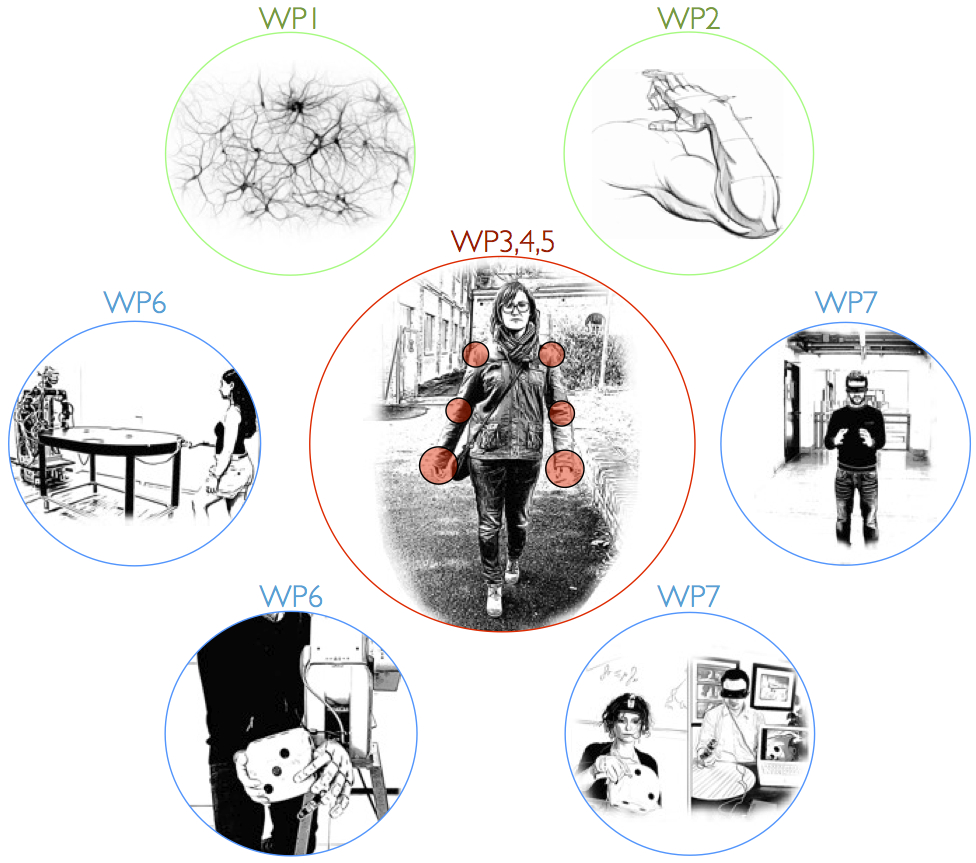 The first layer includes the neuroscience and computational models of the touch, that are necessary in the design of the haptic devices along with tracking and control algorithms:
The first layer includes the neuroscience and computational models of the touch, that are necessary in the design of the haptic devices along with tracking and control algorithms:
- WP1: Neuroscience and physiology: foundations for wearable haptic systems
- WP2: Computational models of human touch
The second layer deals with the development of the integrated wearable haptic system consisting of the distributed multi-DoF and underactuated system, sensing and cognitive control:
- WP3: Multisensory tracking and sensing
- WP4: Wearable and distributed multi-DoF haptic systems
- WP5: Cognitive control of wearable haptic systems
Finally, in the third layer the main representative scenarios are developed:
- WP6: Wearable haptics for human robot interaction and cooperation
- WP7: Wearable haptics for social and healthcare scenarios